A majority of humanity is now living in cities, and mostly in big ones. These cities are largely organized by their street network. Indeed, any activity in a city uses streets as the public interface between buildings, parks, jobs, home, leisure, and so. Because streets concentrate so much usages, they need to be closely mapped and monitored, a tremendous challenge given the incredible amount, diversity, and rapid rate of changes.
You can also get the publication on my
ResearchGate profile.
My CV/Resume and skills also give an idea of my work (beside design and woodworking ).
Seminar talk at Boston University in the Vision&Graphics and Shape lab
Introducing myself, streets reconstruction, and the durable wooden procedural furniture project
Historical collaborative geocoding
What is historical geocoding, and how to help historians perform it
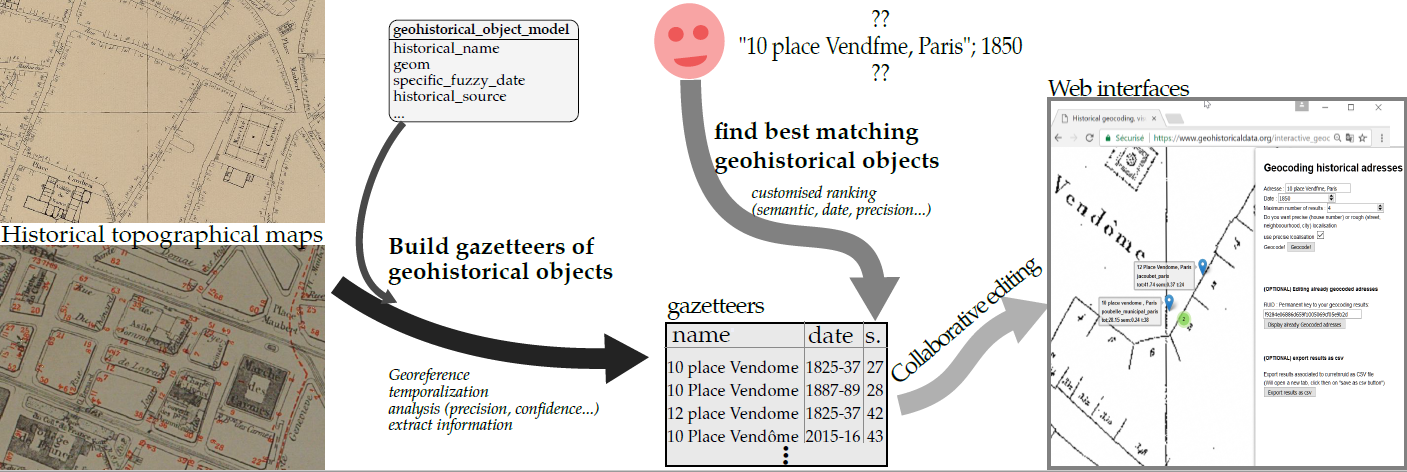 My recent Postdoctoral position was in the GeoHistorical Data team, for the project Belle Epoque.
The goal is to perform geocoding of historical addresses (aka given an input address and date, find the position on the map).
The project heavily relies on extracting information from historical map, and use of database tricks (inheritance, indexes) to robustly and quickly find the geohistorical object that matches the input address and date.
Among the difficulties, everything is fuzzy for geohistorical data : the date of course, but also the spatial position, and even the historical name (misspelling, errors, etc.).
My recent Postdoctoral position was in the GeoHistorical Data team, for the project Belle Epoque.
The goal is to perform geocoding of historical addresses (aka given an input address and date, find the position on the map).
The project heavily relies on extracting information from historical map, and use of database tricks (inheritance, indexes) to robustly and quickly find the geohistorical object that matches the input address and date.
Among the difficulties, everything is fuzzy for geohistorical data : the date of course, but also the spatial position, and even the historical name (misspelling, errors, etc.).
Inverse Procedural Street Modelling
My PhD thesis about reconstructing street for large cities using procedural methods and point clouds.
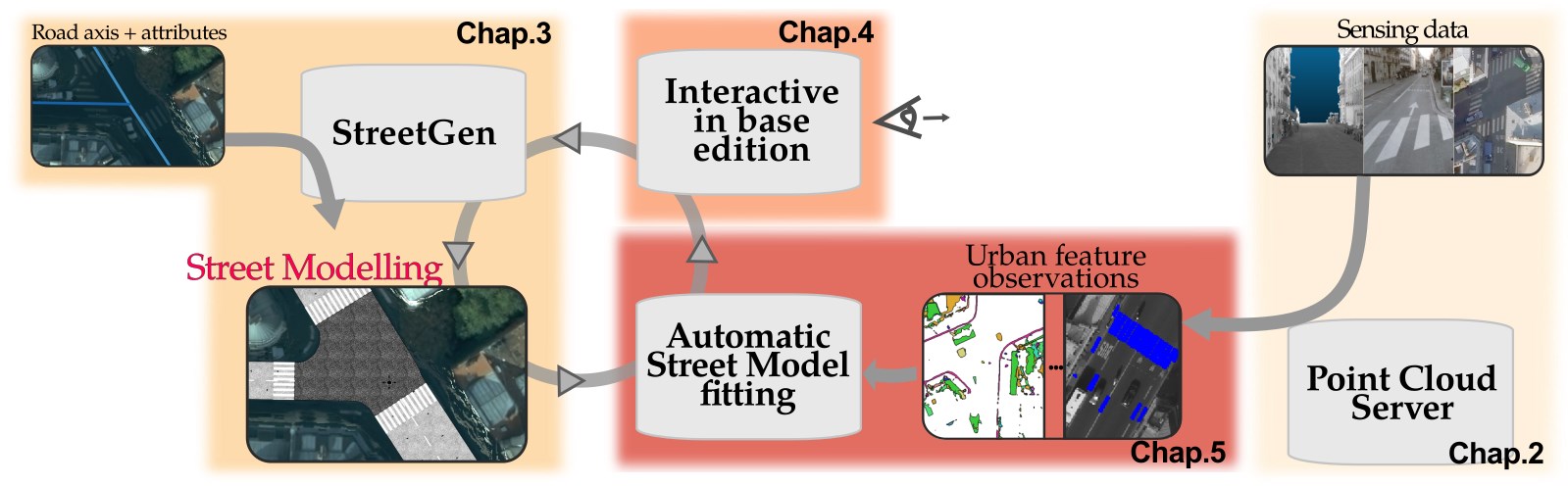
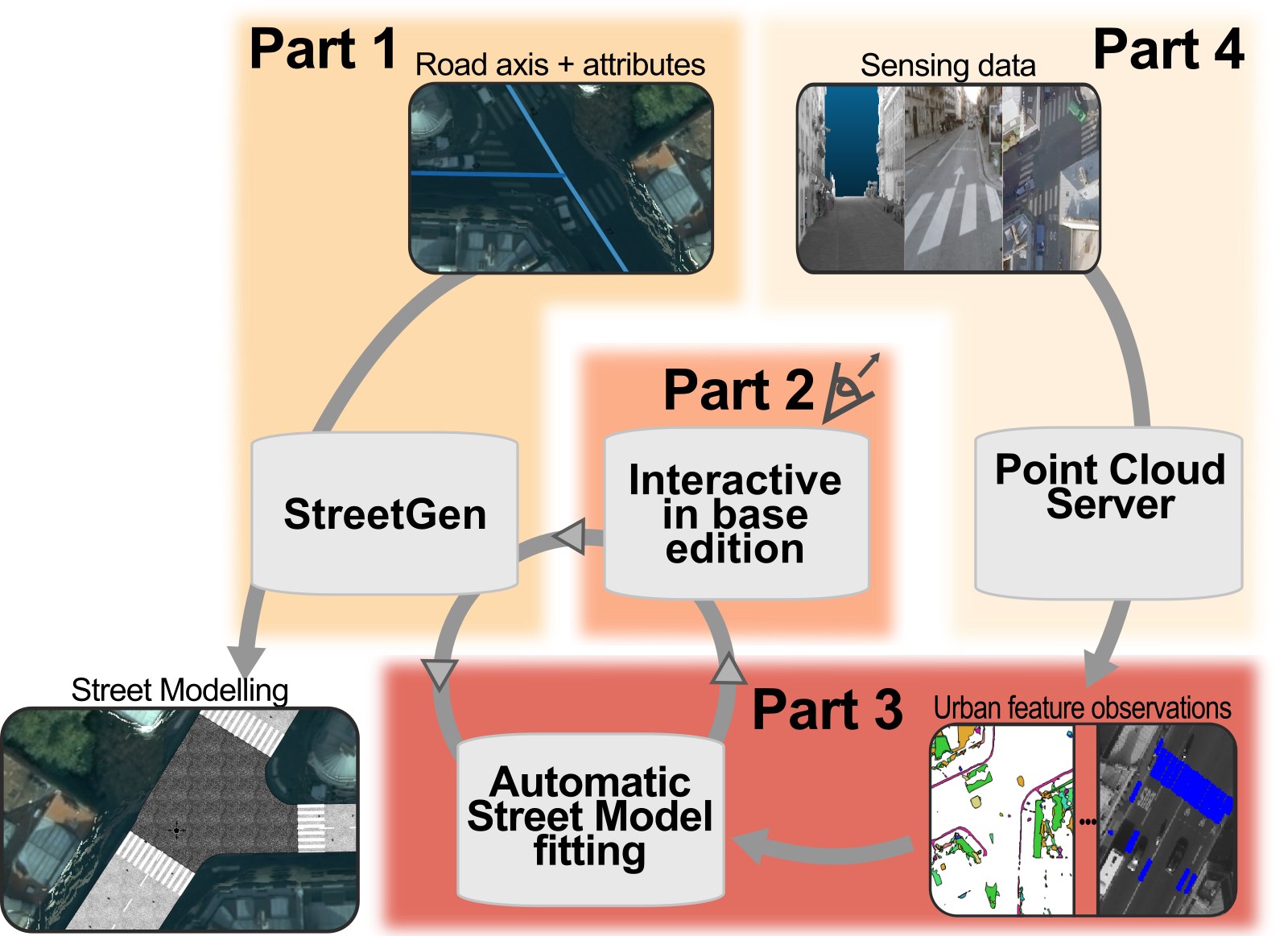 My PhD was about Inverse procedural street modelling, that is generate a street model (Chap3. road network, geometry, traffic information, street objects), then fit this street model to real life (chap5.). Real life here is expressed by massive point clouds (Chap2, Appendix A and B).
Of course, the fitting is automatic, but nevertheless it is essential to allow the users to perform manual edit of the street model, in a in-base shared and concurrent way (chap 4).
My PhD was about Inverse procedural street modelling, that is generate a street model (Chap3. road network, geometry, traffic information, street objects), then fit this street model to real life (chap5.). Real life here is expressed by massive point clouds (Chap2, Appendix A and B).
Of course, the fitting is automatic, but nevertheless it is essential to allow the users to perform manual edit of the street model, in a in-base shared and concurrent way (chap 4).
Implicit Level Of Detail for Point Clouds
LOD contained in the order of points
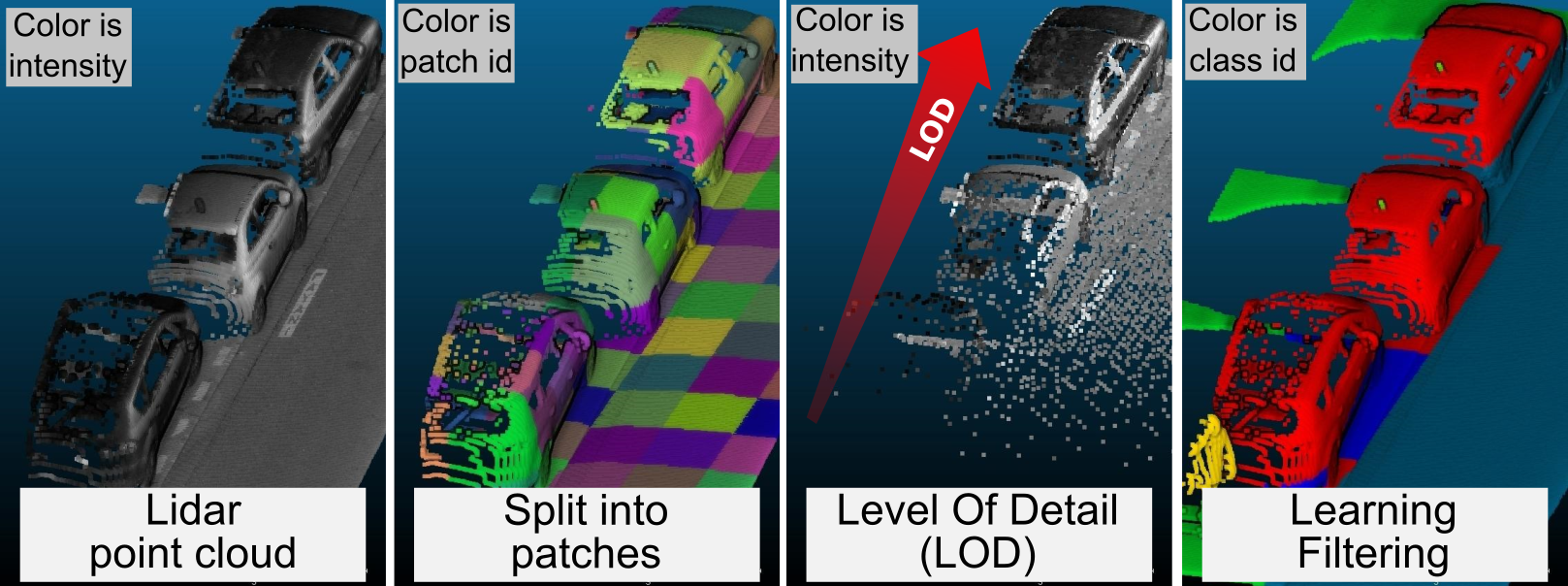 When we created the Point Cloud Server to manage billions of points, several method processing methods were used on points.
It was rapidely clear that for almost any methods, and for visualization in perticular, a way to reduce the number of points was needed.
Our solution was the Implicit Level of Detail method, where points are ordered by decreasing importancy in each group of points (patch). Then reducing the number of point was a matter of taking only the n first points per patch.
The method was refined, and led to the creation of a robust dimensionnality descriptor, along with its uses for classification and pre-processing.
When we created the Point Cloud Server to manage billions of points, several method processing methods were used on points.
It was rapidely clear that for almost any methods, and for visualization in perticular, a way to reduce the number of points was needed.
Our solution was the Implicit Level of Detail method, where points are ordered by decreasing importancy in each group of points (patch). Then reducing the number of point was a matter of taking only the n first points per patch.
The method was refined, and led to the creation of a robust dimensionnality descriptor, along with its uses for classification and pre-processing.
Point Cloud Server
a server to manage massive point clouds
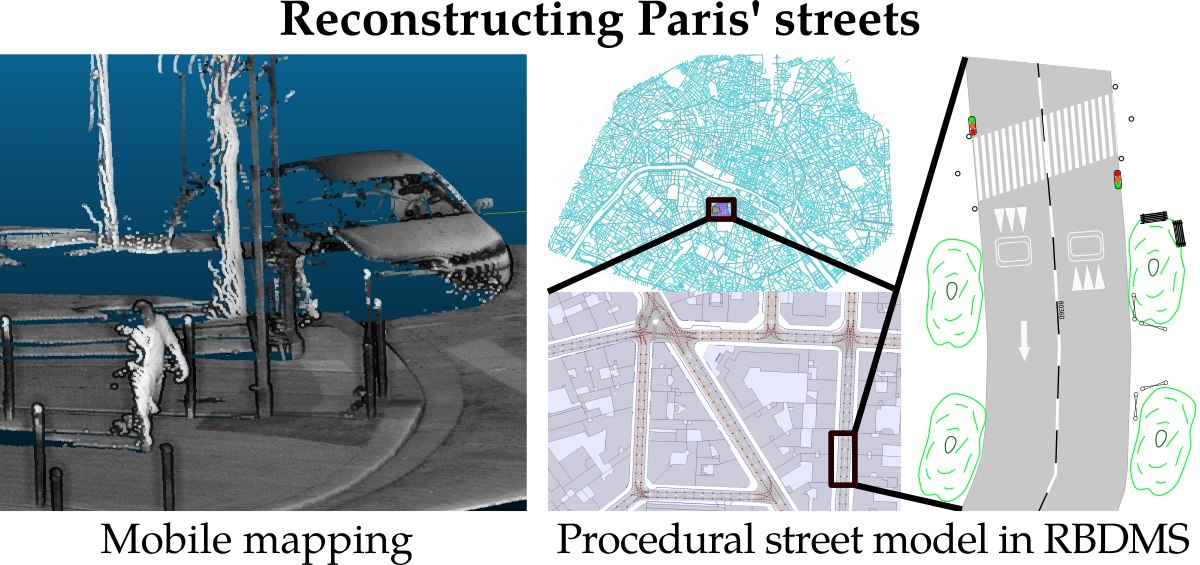
 The Point CLoud Server was developed to manage the billions and billions of Lidar point clouds that were produced daily by IGN mobile mapping system.
Rather than deal with files, which limit sharing, management of metadata and concurrent editing,
we chose to use a database server to store groups of points (patch).
The system was successfully used for the PhD work and other projects, and is still being actively researched.
The Point CLoud Server was developed to manage the billions and billions of Lidar point clouds that were produced daily by IGN mobile mapping system.
Rather than deal with files, which limit sharing, management of metadata and concurrent editing,
we chose to use a database server to store groups of points (patch).
The system was successfully used for the PhD work and other projects, and is still being actively researched.
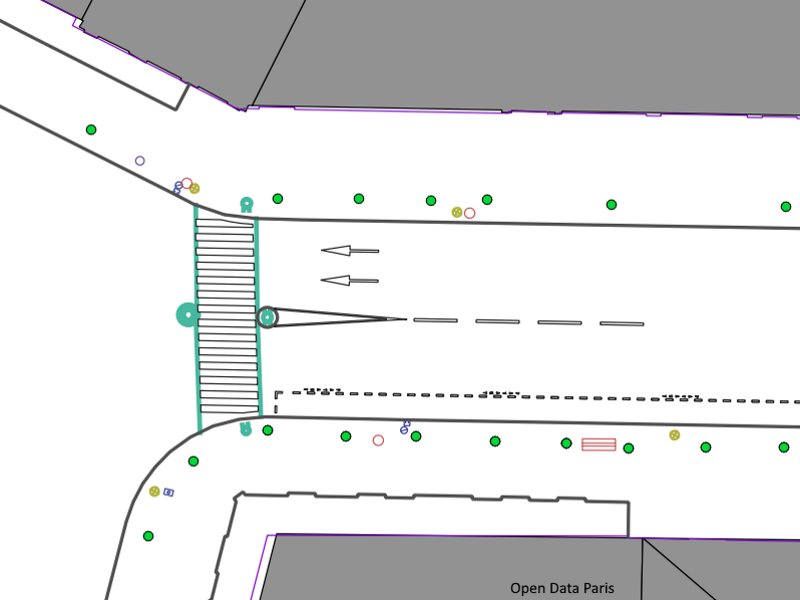
StreetGen
an in-base tool for street modelling
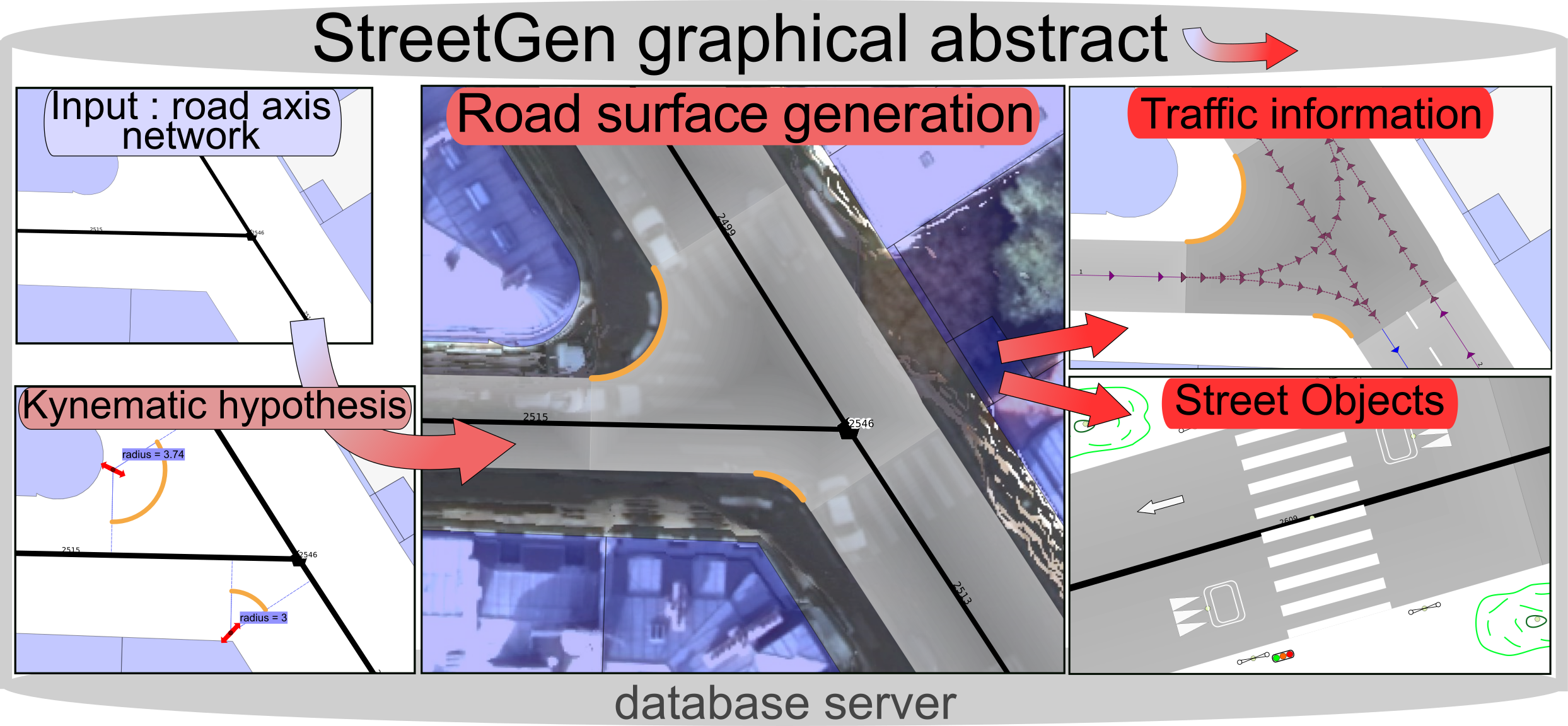 StreetGen is the method that was developed during the PhD to generate a street model including the road, the traffic information, and the street objects.
Everything (base data, method, resulting street model) is contained within a database, which make it scale nicely and allow concurrent interactive editing.
StreetGen is the method that was developed during the PhD to generate a street model including the road, the traffic information, and the street objects.
Everything (base data, method, resulting street model) is contained within a database, which make it scale nicely and allow concurrent interactive editing.